IZENA NEXTAGE-Open – Giza gorputz-enborraren itxurako bi besoko robota
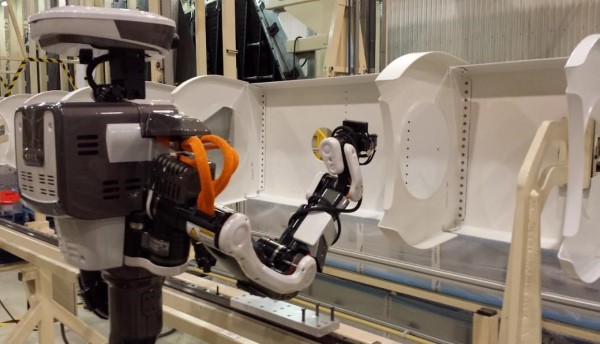
Kawadak fabrikatzen du NEXTAGE OPEN bi besoko robota. Ikerketa-plataforma izateko dago prestatuta, txertatuta daukan software-programazioko inguruneari esker, zeina oso eskalagarria baita. Robotaren softwarea ROSekin bateragarria da. TORK (Tokyo Opensource Robotics Kyokai Association) enpresak egindako open source softwarea eta kontrolagailua ditu. Beso bakoitzean duen kamerari esker, objektuen detekzio zehatza egiten du; buruan dituen bi kamerei eta eskumuturretako kamerei esker, berriz, zenbait angelutatik jasotzen du objektuak detektatzeko informazio bisuala. Segurtasunari dagokionez, berriz, potentzia txikiko motorrak (< 80 W) dituenez eta besoen artikulazioak babestuta dauzkanez, ez dauka elementurik ezer harrapatzeko edo ezeri heltzeko arriskua dakarrenik. SOFTWAREA - Kode erabat irekia (bateragarria zelula robotiko estandarraren proiektuarekin) - Robota kontrolatzeko irispidea (ez du behar PLC/interfazerik) - Programazio aurreratua ROS erabiliz (SNZ Cobot-ekin harmonizatua) - Abiadura (< 250 mm/s), azelerazio eta potentzia (< 80 W) mugatua - Talka-detekzioa - Denbora errealeko higidura-planifikatzailea: ibilbide kalkulatua, ez-programatua HARDWAREA - Unitate trinko eta arina (< 50 kg) - Posizionamendu-errepikagarritasunaren zehaztasuna (TCP): ± 0,03 mm - Posizioaren zehaztasuna ikusmena erabiliz: 0,5 mm - Gehieneko abiadura lineala: 700 mm/s - Hornidura elektrikoa: 220 V - Potentzia-kontsumoa: 1.200-1.500 W - 15 askatasun-gradu (6 x 2 besoetan, 2 lepoan, 1 gerrian) - Beso-luzera: 57 cm - Karga: 1,5 kg esku bakoitzean, 3,0 kg bi besoetan - Ikusmen artifizialeko sistema buruan eta eskuetan
Aplikazio-eremuak
Robot bidezko manipulazio aurreratua
Aplikazio robotizatuetarako malgutasuna
Aplikazio robotizatuetarako malgutasuna
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
Robot bidezko kalitate kontrola
Robot bidezko kalitate kontrola
Robot bidezko manipulazio aurreratua
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
EKIPO ETA OSAGAI GARRANTZITSUENAK
-
2 x Estereoikusmena USB3 koloretako kamera erabiliz
2 x Estereoikusmena USB3 koloretako kamera erabiliz
-
2 x Estereoikusmena USB3 koloretako kamera erabiliz
2 x Estereoikusmena USB3 koloretako kamera erabiliz
-
Matxardak
Matxarda elektrikoa (komunikazio seriea + hornidura)
Matxarda pneumatikoa
Bizarra kentzeko 2 amaierako efektore, eragintza pneumatikokoak
Schunk erreminta-aldagailu pneumatikoa -
Kawada burua
- 2 askatasun-gradu: albora higitzea eta makurtzea
- 1 x Estereoikusmena USB2 kamera erabiliz -
Kawada burua
- 2 askatasun-gradu: albora higitzea eta makurtzea
- 1 x Estereoikusmena USB2 kamera erabiliz -
Kawada gorputz-enborra
- 2 x 6 askatasun-graduko besoak, elektronika integratua dutenak (kontrolatzaileak – CAN komunikazioa)
- 1 x gorputz-enborraren errotazioa -
Matxardak
Matxarda elektrikoa (komunikazio seriea + hornidura)
Matxarda pneumatikoa
Bizarra kentzeko 2 amaierako efektore, eragintza pneumatikokoak
Schunk erreminta-aldagailu pneumatikoa -
Robot-idulkia
-QNX, behe-mailako PCa
-Aplikazioaren kontrola, PCa: Linux Ubuntu + ROS -
Robot-idulkia
-QNX, behe-mailako PCa
-Aplikazioaren kontrola, PCa: Linux Ubuntu + ROS -
Kawada gorputz-enborra
- 2 x 6 askatasun-graduko besoak, elektronika integratua dutenak (kontrolatzaileak – CAN komunikazioa)
- 1 x gorputz-enborraren errotazioa
AKTIBOAK ESKAINTZEN DITUEN ZERBITZUAK
Robot bidezko manipulazio aurreratua
Bin Picking edo Kitting motako pick&place manipulazioa
Aplikazio robotizatuetarako malgutasuna
Talkarik gabeko ibilbideen sorrera automatikoa Zelula robotizatuen programazio automatikoa edo erraza Robota gidatzeko ikusmenean oinarritutako pieza-detekzioa- eta -kokapena Bi besoko higidura koordinatua Roboten teleoperazioa
Aplikazio robotizatuetarako malgutasuna
Talkarik gabeko ibilbideen sorrera automatikoa Zelula robotizatuen programazio automatikoa edo erraza Robota gidatzeko ikusmenean oinarritutako pieza-detekzioa- eta -kokapena Bi besoko higidura koordinatua Roboten teleoperazioa
Nodoko agenteak eskaintzen dituen zerbitzu orokorrak
1. Aholkularitza teknologikoa eta ekonomikoa 2. Diseinua, prototipatzea eta baliozkotzea 1. Aholkularitza teknologikoa eta ekonomikoa 2. Diseinua, prototipatzea eta baliozkotzea 3. Trebakuntza eta sentsibilizazioa
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
Roboten zehaztasunaren hobekuntza Robot bidezko errematxaketa Robot bidezko osagai-muntaketa Robot bidezko torlojutzea Robot bidezko bizar-kentzea
Nodoko agenteak eskaintzen dituen zerbitzu orokorrak
1. Aholkularitza teknologikoa eta ekonomikoa 2. Diseinua, prototipatzea eta baliozkotzea 1. Aholkularitza teknologikoa eta ekonomikoa 2. Diseinua, prototipatzea eta baliozkotzea 3. Trebakuntza eta sentsibilizazioa
Robot bidezko kalitate-kontrola
Piezen kontrol dimentsionala, osotasunarena eta akatsena, robotak eta 3D ikusmena baliatuz
Robot bidezko kalitate-kontrola
Piezen kontrol dimentsionala, osotasunarena eta akatsena, robotak eta 3D ikusmena baliatuz
Robot bidezko manipulazio aurreratua
Bin Picking edo Kitting motako pick&place manipulazioa
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
Roboten zehaztasunaren hobekuntza Robot bidezko errematxaketa Robot bidezko osagai-muntaketa Robot bidezko torlojutzea Robot bidezko bizar-kentzea
AKTIBOA KUDEATZEN DUEN ERAKUNDEA
Harremanetarako pertsona:
Karmele Florentino
karmele.florentino@tecnalia.com