NAME NEXTAGE-Open – Giza gorputz-enborraren itxurako bi besoko robota
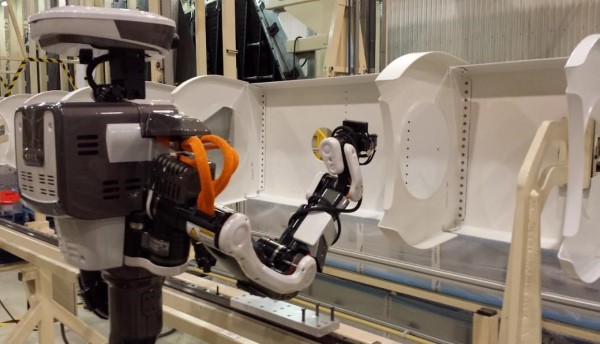
Kawadak fabrikatzen du NEXTAGE OPEN bi besoko robota. Ikerketa-plataforma izateko dago prestatuta, txertatuta daukan software-programazioko inguruneari esker, zeina oso eskalagarria baita. Robotaren softwarea ROSekin bateragarria da. TORK (Tokyo Opensource Robotics Kyokai Association) enpresak egindako open source softwarea eta kontrolagailua ditu. Beso bakoitzean duen kamerari esker, objektuen detekzio zehatza egiten du; buruan dituen bi kamerei eta eskumuturretako kamerei esker, berriz, zenbait angelutatik jasotzen du objektuak detektatzeko informazio bisuala. Segurtasunari dagokionez, berriz, potentzia txikiko motorrak (< 80 W) dituenez eta besoen artikulazioak babestuta dauzkanez, ez dauka elementurik ezer harrapatzeko edo ezeri heltzeko arriskua dakarrenik. SOFTWAREA - Kode erabat irekia (bateragarria zelula robotiko estandarraren proiektuarekin) - Robota kontrolatzeko irispidea (ez du behar PLC/interfazerik) - Programazio aurreratua ROS erabiliz (SNZ Cobot-ekin harmonizatua) - Abiadura (< 250 mm/s), azelerazio eta potentzia (< 80 W) mugatua - Talka-detekzioa - Denbora errealeko higidura-planifikatzailea: ibilbide kalkulatua, ez-programatua HARDWAREA - Unitate trinko eta arina (< 50 kg) - Posizionamendu-errepikagarritasunaren zehaztasuna (TCP): ± 0,03 mm - Posizioaren zehaztasuna ikusmena erabiliz: 0,5 mm - Gehieneko abiadura lineala: 700 mm/s - Hornidura elektrikoa: 220 V - Potentzia-kontsumoa: 1.200-1.500 W - 15 askatasun-gradu (6 x 2 besoetan, 2 lepoan, 1 gerrian) - Beso-luzera: 57 cm - Karga: 1,5 kg esku bakoitzean, 3,0 kg bi besoetan - Ikusmen artifizialeko sistema buruan eta eskuetan
FIELDS OF APPLICATION
Advanced manipulation with robots
Flexibility for robotic applications
Manufacture and assembly of components by robots
Quality control with robots
MOST OUTSTANDING EQUIPMENT AND COMPONENTS
-
2x Stereovision by USB3 Color camera
2x Stereovision by USB3 Color camera
-
Grippers
Electric gripper (serial com + power)
Pneumatic gripper
2 Deburring end-effectors using pneumatics
Schunk pneumatic tool changer -
Head Kawada product
- 2 dof Pan Tilt
- 1x Stereovision by USB2 camera -
Robot Pedestal
-QNX low level PC
-Application control PC: Linux Ubuntu +ROS -
Torso Kawada product
- 2x 6dof arms with embedded Electronics (drivers – CAN com)
- 1x Torso rotation
SERVICES OFFERED BY THE ASSET
Advanced manipulation with robots
Handling pick in place, in Picking or Kitting type
Flexibility for robotic applications
Automatic generation of trajectories without collision Automatic or easy programming of robotic cells Detection and location of parts based on Vision for robot guidance. Dual-arm coordinated motion Teleoperation of robots
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness
Manufacture and assembly of components by robots
Accuracy improvement of robots Riveting with robots Assembly of components with robots Screwed with a robot Deburring with robots
Quality control with robots
Parts dimensional control with robots and 3D vision parts integrity control and defects detection using robots and 3D vision
ENTITY MANAGING THE ASSET
Contact person:
Karmele Florentino
karmele.florentino@tecnalia.com