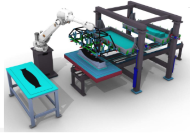
La célula permite plantear operaciones para automatizar operaciones de manipulación de piezas, o manipulación de herramienta sobre pieza. El sistema robótico se puede configurar para realizar operaciones de: pick and place de objetos, o posicionamiento de herramienta sobre objeto tanto en modo convencional como colaborativo. El sistema robótico está formado por un robot manipulador de…
Leer másSistema robótico para manipulación flexible de objetos y herramientas