NEXTAGE-Open - Robot bibrazo de torso humanoide
DESCRIPCIÓN
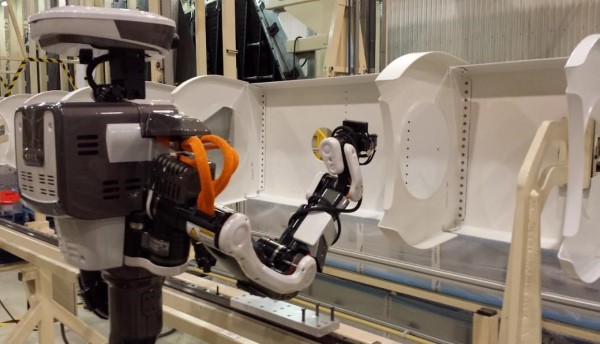
El robot NEXTAGE OPEN es un robot bibrazo del fabricante Kawada. Está enfocado a ser una plataforma de investigación gracias al entorno de programación software que incorpora que es altamente escalable. El sotfware del robot es ROS-compatible. Incorpora un software y controlador open source suministrado por TORK (Tokyo Opensource Robotics Kyokai Association).
Dispone de una cámara en cada brazo que le permiten hacer detección de objetos con precisión y dos cámaras en la cabeza que combinadas con las de las muñecas le permite realizar detección de objetos con información visual desde varios ángulos.
En cuanto a seguridad dispone de motores de baja potencia (<80W) y las articulaciones de los brazos están protegidas y no presentan elementos que puedan ocasionar pellizcos o atrapamientos.
SOFTWARE
- Fully open source (compliant with Standard Robotic cell project)
- Access to the robot control (no PLC/interfaces necessity)
- Advance programming using ROS (harmonized with SNZ Cobot)
- Limited speed (<250 mm/s), acceleration and power (<80W)
- Collision detection
- Real time motion planner: trajectory calculated, no programmed
HARDWARE
- Compact and light-weigh unit (<50Kg)
- Positioning repeatability accuracy (TCP): ± 0.03 mm
- Position accuracy using vision: 0.5 mm
- Max. linear velocity: 700mm/s
- Power supply: 220v
- Power consumption: 1200-1500 W
- 15 DOF (Arms 6x2, Neck 2, Waist 1)
- Length of arm: 57 cm
- Payload: 1,5 Kg per hand, 3.0kg /both arms
- Artificial vision system in head and hands
EQUIPOS Y COMPONENTES MÁS DESTACADOS
2x Stereovision por USB3 cámara a color2x Stereovision por USB3 cámara a color
2x Stereovision por USB3 cámara a color
- 2 dof Pan Tilt
- 1x cámara Stereovision por USB2
Pinza eléctrica (serie com + potencia)
Pinza neumática
2 Desbarbadores de efectores finales mediante neumática.
Cambiador neumático de herramientas Schunk
- 2 dof Pan Tilt
- 1x cámara Stereovision por USB2
-QNX PC de bajo nivel
-Aplicación de control de PC: Linux Ubuntu + ROS
Pinza eléctrica (serie com + potencia)
Pinza neumática
2 Desbarbadores de efectores finales mediante neumática.
Cambiador neumático de herramientas Schunk
-QNX PC de bajo nivel
-Aplicación de control de PC: Linux Ubuntu + ROS
- 2x 6dof brazos con electrónica incorporada (controladores - CAN com)
- 1x rotación del torso
- 2x 6dof brazos con electrónica incorporada (controladores - CAN com)
- 1x rotación del torso
SERVICIOS OFRECIDOS POR EL ACTIVO

Manipulación avanzada con robots
Control calidad con robots
Fabricación y ensamblado de componentes por robots
Flexibilidad para aplicaciones robotizadas
Flexibilidad para aplicaciones robotizadas
Servicios generales ofrecido por el agente del nodo
Manipulación avanzada con robots
Fabricación y ensamblado de componentes por robots
Control calidad con robots
Servicios generales ofrecido por el agente del nodo
ENTIDAD QUE GESTIONA EL ACTIVO
FUNDACIÓN TECNALIA RESEARCH & INNOVATION
Persona de contacto: Karmele Florentino


