Laboratorio de Simulación, Planificación y Asistencia Robótica a la Cirugía (SPARC-LAB)
DESCRIPCIÓN
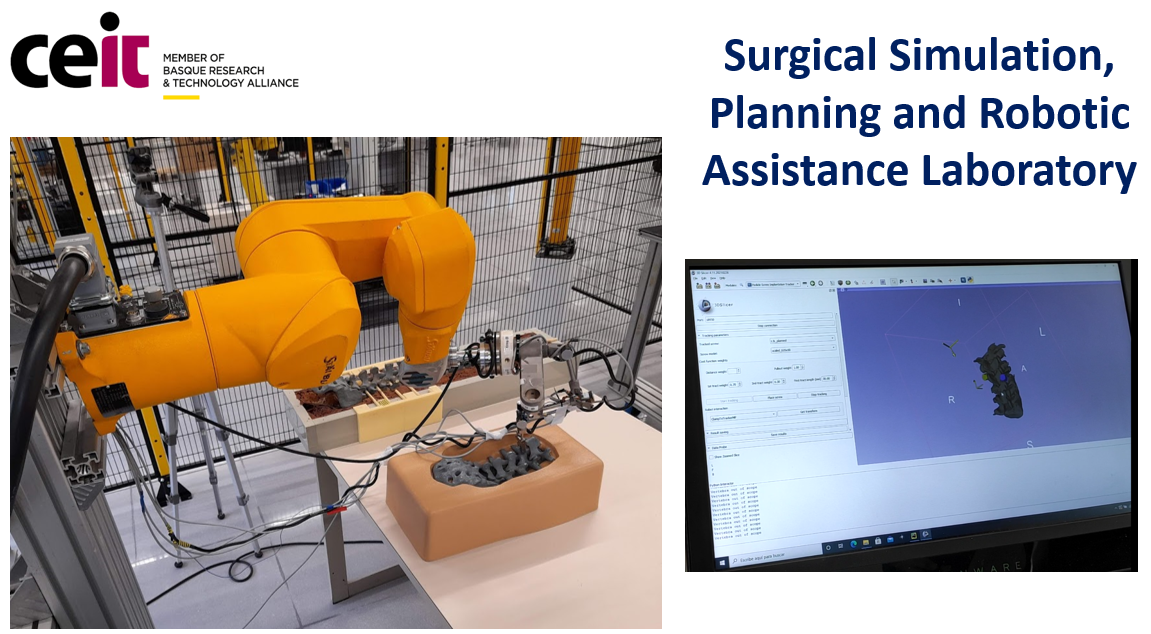
SSPRA-LAB está enfocado al desarrollo de herramientas de entrenamiento, simulación, planificación y asistencia robotizada a la cirugía de propósito general (aplicables a cirugía convencional, mímimanente invasiva, endovascular, biopsias, etc). Compatible con modelos DCOM. Configurable como sistema teleoperación y/o robot colaborativo con restricciones y/o asistencias dinámicas. La unidad robótica puede ser controlada en posición y/o fuerza. Para la ubicación del paciente se puede usar tracker óptico (ej. NDI), palpador mecatrónico, etc.
EQUIPOS Y COMPONENTES MÁS DESTACADOS
Brazo robótico colaborativo OMRON TM90Brazo robótico colaborativo OMRON TM90
Brazo robótico Stäubli TX40 equipado con unival-drive con sensor fuerza/par de 6 ejes.
Sistema óptico Optitrack de gran precisión para tracking óptico
SERVICIOS OFRECIDOS POR EL ACTIVO

Conectividad con sistemas PACS de hospitales
Desarrollo nuevos sistemas biomecatrónicos de asistencia
Estudio de evaluación de dispositivos biomecatrónicos
Estudio y evaluación de la arquitectura óptima para la asistencia robótica
Monitorización de personas
Sensorización de dispositivos
Sistemas de entrenamiento para médicos
ENTIDAD QUE GESTIONA EL ACTIVO

CEIT
Persona de contacto: Emilio Sanchez



Otros activos relacionados
Háblanos de tu necesidad
Deja que te conozcamos mejor. Si buscas implementar tecnologías inteligentes y materiales avanzados que mejoren la eficiencia del sistema productivo de tu empresa para ofrecer soluciones de más valor añadido, completa este formulario.