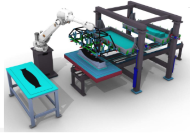
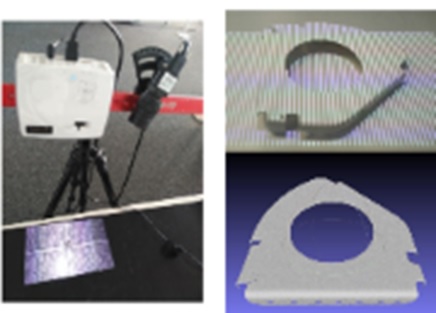
Zelulak aukera ematen du piezak manipulatzeko edo tresna piezaren gainean manipulatzeko eragiketak automatizatzeko eragiketak planteatzeko. Mota honetako eragiketak egiteko konfigura daiteke sistema robotikoa: objektuen pick and place eta tresna objektuaren gainean posizionatzea, bai modu konbentzionalean, bai modu kolaboratiboan. 6/7 askatasun-graduko robot batek osatzen du sistema robotikoa, eta hiru ikusmen-sistema ditu: 1) 3D ikusmeneko kanpo-sistemak, 2)…
Read MoreObjektu eta tresnak malgutasunez manipulatzeko sistema robotikoa